Reports & Papers

Executive Summary
Russian forces have jammed and spoofed GPS continuously across Ukraine since 2022, degrading the precision of Western-supplied munitions and forcing a generation of fielded autonomous systems to operate at reduced effectiveness. Any future fight against a peer or near-peer adversary will involve denial that is more sustained, more sophisticated, and applied at greater scale. United States autonomous-systems doctrine and procurement have not adapted. This paper argues that components of alternative positioning, navigation, and timing (alt-PNT) are mature, that the United States retains an architectural and industrial-base advantage it can convert into fielded capability, and proposes integration architecture and procurement reform as next steps.
Key Assessments:
- Components of alt-PNT are mature; the architecture is under-researched. Visual place recognition derives from the Digital Scene Matching Area Correlator (DSMAC) fielded on Tomahawk cruise missiles in 1986. Terrain-relative navigation also dates to the 1980s, and magnetic anomaly navigation has reached operational demonstration. These existing components in different tech stacks can be integrated to improve operational capacity in drones.
- No single alt-PNT technique is sufficient under all conditions, but a cascading architecture is functional. A digital-twin demonstrator, loc8, is presented in Chapter 3 to show a four-tier cascade: visual, terrain, magnetic, and inertial. The demonstrator contains explicit failover logic and observable degradation.
- The United States should buy into system architecture. Adversaries are facing the same technical problems but do not have developed system architecture, which is an opportunity for the United States. Current American procurement specifies sensors, but this paper proposes that procurement guidelines should specify architectures with documented failure modes. Recommendations in Chapter 4 assign roles to different agencies with 2027 fielding targets.
Introduction: GPS-Denied Environments & Alt-PNT
Militaries depend on the Global Positioning System (GPS) for key functions including artillery accuracy, drone navigation, communications timing, and the ability of autonomous systems to follow a flight plan.1 Russian electronic warfare units have disrupted GPS continuously across the Ukrainian theater since 2022, prompting strategic interest in mitigating GPS disruption.2 Common disruption strategies are jamming and spoofing. Jamming is broadcasting noise on GPS frequencies to drown out satellite signals, and spoofing is broadcasting false signals to receivers about their position.3 Ukrainian intelligence assessments in 2024, since made public, document GPS-disruption strategies as damaging to the performance of both Excalibur (a GPS-guided artillery shell) and JDAM-Extended Range (kits that convert unguided bombs to GPS-guided glide weapons).4
Iranian forces have employed similar techniques in the Strait of Hormuz and Red Sea, disrupting GNSS for over one thousand commercial vessels in a single day in March 2026.5 Chinese capabilities are more advanced: the People’s Republic of China (PRC) has demonstrated direct-ascent anti-satellite (ASAT) weapons, which are missiles launched from Earth to destroy satellites in orbit.6 The PRC operates the BeiDou satellite navigation system as a strategic alternative to GPS, and concurrently fields GPS spoofing systems that can deceive foreign receivers about their location.7 Further, China’s People's Liberation Army (PLA) has developed counterspace capabilities including electronic warfare and jamming systems, which it integrates into Taiwan-pressure exercises such as the April 2023 Joint Sword drills around the island.8
GPS-denied environments are therefore an operational reality. Positioning, navigation, and timing (PNT) that GPS provides is essential for most modern autonomous platforms.9 Without resilient PNT, autonomous systems can fail. American doctrine and procurement have not yet adapted. Existing autonomous-technology acquisition lines including the recent Replicator initiative (the Department of Defense program to field thousands of cheap autonomous drones at speed), Air Force Collaborative Combat Aircraft (uncrewed wingmen for crewed fighters), Navy undersea unmanned vehicles, and Army autonomous logistics programs do not specify alt-PNT architecture as a procurement requirement, leaving each program to make its own PNT assumptions without portfolio-level guidance.10
Alternative PNT, or alt-PNT, is the umbrella term for any architecture that delivers position, navigation, and timing without GPS, drawing instead on cameras, terrain shape, magnetic field readings, inertial sensors, and other signals. In current procurement, alt-PNT is not integrated into autonomous systems at the rate it should be in the context of our current operational environment. In this paper, I argue for increased procurement of an alt-PNT architecture. Chapter 1 establishes why PNT is a key hurdle for autonomous systems. Chapter 2 explores the existing technical landscape. Chapter 3 makes the architectural argument for cascade architecture and presents a browser-based digital-twin demonstrator that operationalizes the cascade and makes the architecture legible to a non-technical audience. Finally, Chapter 4 issues recommendations to named offices with a 2027 fielding target.
Chapter 1: Resilient PNT & Autonomous Systems
In the context of this paper, autonomy narrows to the ability of a platform to know its location, target, and how to reach the target without continuous human input. Without resilient PNT, every autonomous capability becomes reliant on either remote piloting, which is vulnerable to communications denial, or to dead reckoning.
PNT dependence scales with autonomy. As platforms move along the spectrum from remote-piloted, to human-on-the-loop, to fully autonomous, the bandwidth demands on the communications link compress, but the precision and update-rate demand on internal navigation increase.11 A fully autonomous platform must navigate, identify, and engage without communication with an operator.12 Therefore, as systems become more autonomous, they become more dependent on their respective PNT layers. When that layer is jammed or disrupted, the platform fails. The PNT layer is the foundation on which autonomy investment rests.
Three use cases illustrate the demand signal and clarify why a single solution cannot serve all of them. A loitering munition on an hours-long mission needs sub-meter terminal accuracy and is small enough that size, weight, and power constraints exclude many sensor options.13 Under GPS-denial, terminal error compounds with cruise drift, and the munition misses or strikes a near-target.14 A long-endurance ISR drone needs continuous fixes over hundreds of kilometers in environments with variable terrain features and weather; without resilient PNT, collected imagery is geolocated to a footprint too large to be operationally useful.15 A logistics platform operating in a contested area needs reliable navigation under cluttered urban conditions where satellite-based methods are degraded even without active denial; loss of fix here leads to a stop.16
Alt-PNT must be configurable across mission types, not optimized for one. Current procurement does not yet reflect this. The Air Force recently awarded autonomy-software contracts under the Collaborative Combat Aircraft program.17 Contracts included RTX for General Atomics' YFQ-42A and Shield AI for Anduril's YFQ-44A.18 Still, these contracts lack parallel architecture specifications for the PNT stack on which that autonomy software depends.19 The contracts specify the autonomy capability but do not specify how the platform might navigate a GPS-denied environment or how the platform would perform when navigation fails. Autonomy contracts move quickly, but the PNT layer they assume moves slowly.20
Chapter 2: The Existing Alt-PNT Tech Stack
The components of an alt-PNT architecture are visual place recognition, terrain-relative navigation, magnetic anomaly navigation, and inertial coasting. Each is individually mature and audited in this chapter. Honest assessment of the alt-PNT landscape requires naming the lineage of each technique, as each component has already been invented in some form. Integrating these components into a single alt-PNT technology stack would be valuable to American alt-PNT development.
- Inertial. Inertial measurement units provide the base for any alt-PNT solution. These include MEMS, fiber-optic gyroscope, ring laser gyroscope. They are universally fielded and bounded by drift. Without external corrections, position errors accumulate polynomially (growing quadratically or cubically over time depending on the specific sensor biases).21
- Visual place recognition (VPR). The 1986 Digital Scene Matching Area Correlator on Tomahawk cruise missiles operationalized the concept of matching live imagery to pre-loaded reference scenes. Modern VPR runs the same fundamental algorithm on commodity compute and commodity sensors. The technique fails under cloud cover, dramatic lighting changes, and seasonal variation.22
- Terrain-relative navigation (TRN). The Terrain Contour Matching system fielded in 1983 matched radar altimetry against terrain databases. Modern TRN uses radar or lidar altimetry against high-resolution digital elevation models. TRN works through cloud, but accuracy depends on terrain feature density, meaning that it performs well over varied topography and poorly over flat or featureless regions.23
- Magnetic anomaly navigation (MagNav). Earth’s magnetic field has location-unique anomaly signatures, meaning that matching airborne measurements against a reference map yields position. The Air Force Research Laboratory and the MIT Lincoln Laboratory have demonstrated MagNav at aircraft scale.The limitation is the reference map as a globally referenced, high-resolution magnetic anomaly map is not yet publicly available.24
- Celestial and star trackers. Mature on spacecraft and used historically on long-range ballistic missiles for mid-course correction. Smaller, daytime-capable trackers are emerging.25
- Signals of opportunity (SoOP). Cellular, broadcast television, and Iridium Satellite Time and Location transmissions can serve as PNT signals. The category is operationally useful in urban environments but vulnerable to active jamming and to infrastructure destruction in any major conflict.26
- LEO alternative-PNT. Commercial constellations including Xona Pulsar, TrustPoint, and Satelles propose to provide PNT signals from low Earth orbit. These are GPS-replacement candidates rather than GPS-supplement and share the orbital fragility of GPS in any anti-satellite scenario. They merit funding but should not be treated as a strategic answer to denial.27
- Quantum sensing. Cold-atom interferometry and related techniques promise inertial sensors with orders-of-magnitude lower drift. The UK MoD has fielded notable cold-atom interferometry work, and parallel US efforts at DARPA, MIT Lincoln Lab, and Honeywell are advancing on a similar timeline. Small-platform fielding is five to ten years away from regular use: the Defense Innovation Unit’s Transition of Quantum Sensing program confirms that current quantum gravimeters and inertial sensors are functional for large vehicles but not functional for small platforms.28
The existing technology listed is uneven across both maturity and size-weight-and-power suitability for small, unmanned aircraft. Inertial, VPR, TRN, and celestial are operationally fielded; MagNav and SoOP are at advanced demonstration; LEO alt-PNT is fielded but limited; quantum remains in research. No single component is sufficient to solve alt-PNT, so an architectural construction is necessary.
Chapter 3: Cascade Architecture & “loc8” Demonstrator
The technology audit above shows that no single alt-PNT technique works under all conditions a fielded autonomous system will encounter: VPR fails under cloud; TRN fails over flat terrain; MagNav requires a reference map that does not yet exist at the resolution needed; LEO alt-PNT shares GPS’s vulnerabilities. Therefore, a resilient alt-PNT system must layer multiple tiers with documented confidence thresholds and graceful degradation paths. This describes a cascade architecture.
Cascading sensor fusion is standard practice in commercial autonomous systems. Skydio drones, Waymo vehicles, and Anduril Lattice integrate multiple sensors with explicit failover logic.29 Current Department of Defense solicitations specify components (integrate x sensor, field y algorithm) rather than performance under denial.30 Architecture-level requirements would push primes and startups to integrate; component-level requirements lock procurement into single vendor stacks that fail when the vendor’s chosen technique fails. The procurement implication is the single most important policy lever in this paper.
loc8, A Browser-Based Demonstrator of the Alt-PNT Cascade
The components of alternative PNT are mature, so the architectural answer is a cascade. To demonstrate what this might look like, I made a browser-based digital twin called loc8 built to make that argument legible to readers who do not work in robotics. It is not a flight test, and it does not validate any specific hardware but very simply demonstrates what a cascading alt-PNT architecture should deliver under specified conditions. The platform makes the failure modes of each tier visible in operation rather than describing them in prose, and a user may play around with different launch and target coordinates.
The demonstrator implements the four tiers introduced in this paper. Visual place recognition is the primary tier, with a published accuracy of roughly six meters and a known failure mode under cloud cover. Terrain-relative navigation is the first fallback, with roughly twenty-eight meters median error and a per-fix probability of approximately 0.78 in the implementation. Magnetic anomaly navigation is the second fallback, with roughly ninety-five meters median error and a per-fix probability of approximately 0.88. Inertial coasting is the floor: when no tier achieves a fix, the system dead-reckons, and drift is unbounded. The cascade transitions automatically from primary to fallback when a tier fails to meet its confidence threshold, and the user can toggle the fallback logic to observe the contrast. I also include live cloud cover and wind of the desired location.
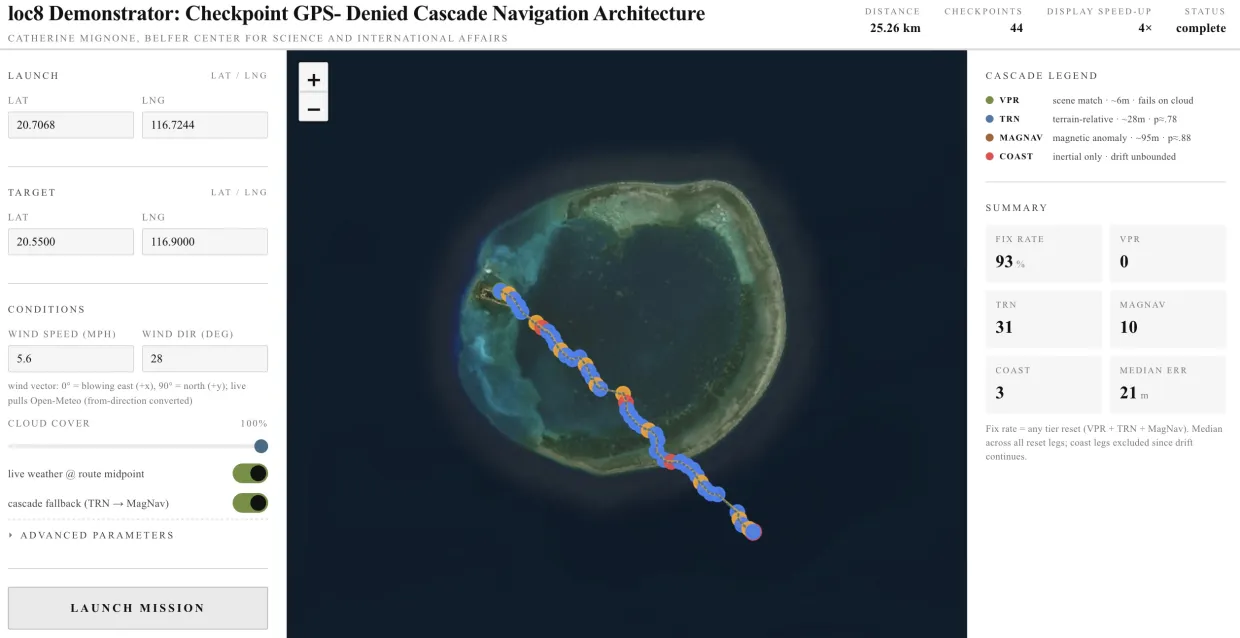
Figure 1 shows a single mission run under hard conditions. The cascade flew a 25.26-kilometer, forty-four-checkpoint route across Pratas Atoll (Dongsha) with 100% cloud cover and a 5.6 mph wind, vector heading 28°, pulled live from Open-Meteo at the route midpoint, against default cascade thresholds. Under those conditions VPR, the highest-accuracy tier, but the one most sensitive to cloud, contributed no fixes; TRN absorbed the bulk of the load with thirty-one; MagNav added ten; and the cascade fell through to inertial coast three times over forty-four legs. The run recorded a 93% fix rate and a 21-meter median error across reset legs. This is the cascade behaving as designed: as the tier most vulnerable to a specific environmental condition degraded, the next tier absorbed the load, and the system delivered a fix at ninety-three percent of checkpoints rather than failing outright. A single-sensor GPS-default platform under the same denial conditions would not be navigating at all.
These numbers are best read as a single observation, and I encourage readers to try different coordinates under different weather and wind conditions. Changes in conditions will produce different results: heavier cloud degrades VPR availability, flatter terrain degrades TRN, and the per-tier confidence thresholds in the advanced parameters panel materially affect both fix rate and median error. The purpose of the run is to make the architecture's behavior visible. Nearly every position update on this route came from a sensor tier with a real fix, and the cascade fell through to drift-bound dead reckoning on only three of forty-four legs. The failover transitions between tiers are observable in the per-checkpoint visualization. The same cascade would behave similarly over other contested geographies, with tier weights varying by environment. loc8 is configurable to support those alternate cases.
loc8 is a digital twin and not a hardware construction, so the per-tier accuracy figures should be read as architectural targets rather than empirical validation of any specific implementation. Weather, wind, and cloud-cover parameters are wired to live data and operate today; sensor noise injection, GPS-spoofing toggles, and adversarial denial scenarios are explicitly out of scope in the current build and named here as future work.
Chapter 4: Opportunities & Recommendations
American autonomous systems already face GPS denial, and the adversary platforms they will operate against face the same physics. Russian, Chinese, and Iranian autonomous-systems programs are integrating alt-PNT capabilities at scale, though none has yet fielded the layered cascade this paper argues the United States should build. Neither Russia nor China hosts an integrated multi-tier cascade: adversary platforms remain largely single-seeker designs with optical or anti-radiation terminal guidance bolted onto inertial cruise, but the trajectory is clear. The opportunity for the United States is that it retains an architectural and industrial-base lead in commercial alt-PNT: Xona Space Systems, TrustPoint, Satelles, Honeywell, Northrop Grumman, and new startups produce sensor stacks and software whose maturity exceeds anything publicly visible from adversary industry. The window to convert that lead into fielded architecture is open now and closes as adversary integration progresses.
The recommendations below assign specific actions to named offices on a 2027 fielding horizon:
- The Defense Innovation Unit should issue a Commercial Solutions Opening for cascading alt-PNT at small, unmanned aircraft system scale, with architecture-level requirements rather than component specifications and a 2027 fielding target aligned to Defense Autonomous Warfare Group (DAWG) and Drone Dominance program phases. DIU's Commercial Solutions Opening pathway was created to procure the dual-use profile of commercial sensor stacks and software that cascading alt-PNT requires.
- The National Geospatial-Intelligence Agency, in partnership with NOAA's National Centers for Environmental Information and the United Kingdom Defence Geographic Centre, should accelerate production of a high-resolution, low-altitude magnetic anomaly map suitable for small unmanned aircraft system MagNav, building on the existing EMAG2v3 and World Digital Magnetic Anomaly Map products and prioritizing operationally relevant regions.
- Program Executive Offices and equivalent acquisition authorities across the services with autonomous-platform programs of record, including but not limited to the Joint Program Executive Office for Armaments and Ammunition (JPEO A&A), the Air Force Program Executive Office for Fighters and Advanced Aircraft, the Navy Program Executive Office for Unmanned and Small Combatants, and the Army Program Executive Offices for Aviation and Ground Combat Systems, should add architecture-level alt-PNT requirements to all programs of record by Fiscal Year 2027. Single-sensor alt-PNT bolted onto GPS-default platforms is the failure mode this paper is written against.
- The Department of Defense should provide contractors with a reference cascade architecture and open application programming interfaces for military alt-PNT, extending the Modular Open Systems Approach mandate (10 USC 4401) to the alt-PNT layer. An open architecture lowers barriers to entry, expands competition, and modularizes the stack so vendors can compete on individual tiers without building complete vertical solutions.
The platforms now entering DAWG, Drone Dominance, and Collaborative Combat Aircraft programs will have to function under GPS-denial; whether they navigate under denial is determined by procurement decisions taken today. The recommendations above are practical, assignable, and feasible on the 2027 horizon.
Recommended citation
Mignone, Catherine. “Navigating Without GPS: A Cascading Alt-PNT Architecture for American Defense.” June 29, 2026
Footnotes
- GPS Alternatives (United States Government Accountability Office, 2022), https://www.gao.gov/assets/gao-22-106010.pdf.
- Kari A. Bingen, Extending the Battlespace to Space, September 16, 2025, https://www.csis.org/analysis/chapter-8-extending-battlespace-space.
- FAA GPS and GNSS Interference Resource Guide (Federal Aviation Administration, 2026), Section 1.5: How Jamming and Spoofing Work, https://www.faa.gov/about/office_org/headquarters_offices/avs/offices/afx/afs/afs400/afs410/GNSS/GPS_GNSS_Interference_Resource_Guide.pdf; “GNSS Jamming and Spoofing | SKYbrary Aviation Safety,” accessed May 11, 2026, https://skybrary.aero/articles/gnss-jamming-and-spoofing.
- “Russian Jamming of U.S. Weapons in Ukraine Forces Pentagon to Adjust - The Washington Post,” accessed May 11, 2026, https://www.washingtonpost.com/world/2024/05/24/russia-jamming-us-weapons-ukraine/.
- “Strait of Hormuz Siege Leaves Sailors Dodging Missiles and GPS Jamming,” Bloomberg.Com, March 18, 2026, https://www.bloomberg.com/graphics/2026-strait-hormuz-iran-blockade-ships-stranded-gps-jamming/; “Constant GPS Jamming Disrupts Navigation in Strait of Hormuz,” The Maritime Executive, accessed May 11, 2026, https://maritime-executive.com/article/constant-gps-jamming-disrupts-navigation-in-strait-of-hormuz; Katie Hunt, “GPS Jamming Is Emerging as an Increasingly Prevalent — and Troubling — Weapon of War,” CNN Science, CNN, March 6, 2026, https://ix.cnn.io/dailygraphics/graphics/20250623-strait-of-hormuz-map/index.html?initialWidth=606&childId=cms.cnn.com/_components/graphic/instances/cmmdl5qbg000c356rzrqo9svq@published&parentTitle=GPS%20jamming%20and%20its%20use%20in%20the%20Iran%20war%2C%20explained%20%7C%20CNN&parentUrl=https%3A%2F%2Fwww.cnn.com%2F2026%2F03%2F06%2Fscience%2Fgps-jamming-ships-planes-iran-war.
- Clayton Swope et al., Space Threat Assessment 2025, April 25, 2025, https://www.csis.org/analysis/space-threat-assessment-2025.
- Mark Harris archive page, “Ghost Ships, Crop Circles, and Soft Gold: A GPS Mystery in Shanghai,” MIT Technology Review, accessed May 11, 2026, https://www.technologyreview.com/2019/11/15/131940/ghost-ships-crop-circles-and-soft-gold-a-gps-mystery-in-shanghai/; Sean Gorman, “The Urgent Need for a National GPS Jamming Detection System,” SpaceNews, November 27, 2024, https://spacenews.com/the-urgent-need-for-a-national-gps-jamming-detection-system/; Joseph Trevithick, “New Type Of GPS Spoofing Attack In China Creates ‘Crop Circles’ Of False Location Data,” The War Zone, November 18, 2019, https://www.twz.com/31092/new-type-of-gps-spoofing-attack-in-china-creates-crop-circles-of-false-location-data.
- “Military and Security Developments Involving the People’s Republic of China 2024,” Annual Report to Congress (Washington, DC), 2024, 67, 113.
- “What Is Positioning, Navigation and Timing (PNT)? | US Department of Transportation,” accessed May 11, 2026, https://www.transportation.gov/pnt/what-positioning-navigation-and-timing-pnt.
- “U.S. Air Force Collaborative Combat Aircraft (CCA),” legislation, accessed May 11, 2026, https://www.congress.gov/crs-product/IF12740; “Unmanned Underwater Vehicles (UUVs) - General Dynamics Mission Systems,” accessed May 11, 2026, https://gdmissionsystems.com/underwater-vehicles; Ashley Roque, “Pentagon Officials Broadly Detail $55 Billion Drone Plan under DAWG,” Breaking Defense, April 21, 2026, https://breakingdefense.com/2026/04/pentagon-officials-broadly-detail-55-billion-drone-plan-under-dawg/; “Redefining Logistics: Army Demonstrates Breakthrough in Autonomous Ship-to-Shore Resupply,” Www.Army.Mil, April 29, 2025, https://www.army.mil/article/285029/redefining_logistics_army_demonstrates_breakthrough_in_autonomous_ship_to_shore_resupply.
- DoD Directive 3000.09 “Autonomy in Weapon Systems”, 3-6, 21 (U.S. Department of Defense, 2023).
- “The Autonomous Arsenal in Defense of Taiwan: Technology, Law, and Policy of the Replicator Initiative | The Belfer Center for Science and International Affairs,” February 3, 2025, https://www.belfercenter.org/replicator-autonomous-weapons-taiwan.
- “Micro-Technology for Positioning, Navigation and Timing (Micro-PNT),” accessed May 11, 2026, https://www.darpa.mil/research/programs/micro-technology-for-positioning-navigation-and-timing.
- Ahmed Elamin et al., “Event-Based Visual/Inertial Odometry for UAV Indoor Navigation,” Sensors 25, no. 1 (2024): 61, https://doi.org/10.3390/s25010061; Michael Bartock et al., Foundational PNT Profile: Applying the Cybersecurity Framework for the Responsible Use of Positioning, Navigation, and Timing (PNT) Services, NIST Internal or Interagency Report (NISTIR) 8323 Rev. 1 (National Institute of Standards and Technology, 2023), https://doi.org/10.6028/NIST.IR.8323r1.
- Jon C. Leachtenauer and Ronald G. Driggers, Surveillance and Reconnaissance Imaging Systems: Modeling and Performance Prediction, 55-56, 245-252, Artech House Optoelectronics Library (Artech House, 2001); Padmaja Vedula et al., Outsmarting Agile Adversaries in the Electromagnetic Spectrum (2023), Executive Summary, 14, Figure 5.2, https://www.rand.org/pubs/research_reports/RRA981-1.html.
- Bartock et al., Foundational PNT Profile, 5-6; Gagan Masaun, Autonomous Truck Mounted Attenuator (ATMA) Toolkit, 14-15, 38 n.d.; Robotics and Autonomous Systems Strategy, 9-13, (U.S. Army, 2017).
- “U.S. Air Force Collaborative Combat Aircraft (CCA).”
- “YFQ-44A Flies with Mission Autonomy Software from Anduril & Shield AI,” Anduril, February 26, 2026, https://www.anduril.com/news/yfq-44a-flies-with-mission-autonomy-software-from-anduril-and-shield-ai; Sarah Simpson, “Honeywell Selected by U.S. DoD to Advance Quantum Sensing for GPS-Denied Navigation,” Defense Advancement, August 5, 2025, https://www.defenseadvancement.com/news/honeywell-selected-by-u-s-dod-to-advance-quantum-sensing-for-gps-denied-navigation/; “RTX’s Collins Aerospace Autonomy Solution, Sidekick, Flies GA-ASI’s YFQ-42A CCA Platform,” United Technologies, accessed May 11, 2026, https://www.rtx.com/news/news-center/2026/02/20/rtxs-collins-aerospace-autonomy-solution-sidekick-flies-ga-asis-yfq-42a-cca-p.
- “Modular Open Systems Approach (MOSA),” Defense Standardization Program, accessed May 11, 2026, https://www.dsp.dla.mil/Programs/MOSA/; Resilient Positioning, Navigation, and Timing (PNT) Reference Architecture, n.d., https://www.dhs.gov/sites/default/files/2022-06/22_0609_st_resilient_pnt_ra.pdf.
- Theresa Hitchens, “Uncertainty over Satellite Constellation Means Alt-GPS Capability up in the Air: Official,” Breaking Defense, September 23, 2025, https://breakingdefense.com/2025/09/uncertainty-over-satellite-constellation-means-alternate-gps-capability-up-in-the-air-as-well-official/; U. S. Government Accountability Office, “Weapon Systems Annual Assessment: DOD Leaders Should Ensure That Newer Programs Are Structured for Speed and Innovation | U.S. GAO,” June 11, 2025, https://www.gao.gov/products/gao-25-107569.
- “ARTECH HOUSE USA : Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems, Second Edition,” accessed May 11, 2026, https://us.artechhouse.com/Principles-of-GNSS-Inertial-and-Multisensor-Integrated-Navigation-Systems-Second-Edition-P2046.aspx; Xiaoji Niu et al., “Fast Thermal Calibration of Low-Grade Inertial Sensors and Inertial Measurement Units,” Sensors (Basel, Switzerland) 13, no. 9 (2013): 12192–217, https://doi.org/10.3390/s130912192.
- Stephanie Lowry et al., “Visual Place Recognition: A Survey,” IEEE Transactions on Robotics 32, no. 1 (2016): 1–19, https://doi.org/10.1109/TRO.2015.2496823; “Tomahawk,” Missile Threat, n.d., accessed May 11, 2026, https://missilethreat.csis.org/missile/tomahawk/.
- “The Evolution of the Cruise Missile,” accessed May 11, 2026, https://apps.dtic.mil/sti/citations/ADA162646; “ARTECH HOUSE USA : Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems, Second Edition.”
- “MagNav Project Successfully Demonstrates Real-Time Magnetic Navigation | MIT Lincoln Laboratory,” accessed May 11, 2026, https://www.ll.mit.edu/news/magnav-project-successfully-demonstrates-real-time-magnetic-navigation.
- C. C. Liebe, “Star Trackers for Attitude Determination,” IEEE Aerospace and Electronic Systems Magazine 10, no. 6 (1995): 10–16, https://doi.org/10.1109/62.387971; Peter F. Swaszek et al., “Celestial Navigation – Correcting the Folklore,” April 23, 2020, 949–59, https://doi.org/10.1109/PLANS46316.2020.9109928.
- Resilient Positioning, Navigation, and Timing (PNT) Reference Architecture; Zak Kassas, “PNT With Signals of Opportunity and Real-World Jammed and Spoofed Environments,” November 30, 2023, https://rosap.ntl.bts.gov.
- Taylar Rajic et al., Maintaining the Space Edge: Strategic Reforms for U.S. Dominance in Low Earth Orbit, February 2, 2026, https://www.csis.org/analysis/maintaining-space-edge-strategic-reforms-us-dominance-low-earth-orbit; Furqan Ahmed et al., “TrustPoint LEO PNT: Evaluating Geometric Strength, Urban Availability, and Multi-Constellation Integration,” September 12, 2025, 2332–45, https://doi.org/10.33012/2025.20325; “Pulsar - eoPortal,” accessed May 11, 2026, https://www.eoportal.org/satellite-missions/pulsar.
- “Future Navigation System,” New Electronics 56, no. 6 (2023): 44–44, https://doi.org/10.12968/S0047-9624(23)60816-8; “Small But Mighty: Magnetometers and the Future of Inertial Navigation,” Northrop Grumman, accessed May 11, 2026, https://www.northropgrumman.com/what-we-do/mission-solutions/assured-navigation/small-but-mighty-magnetometers; “DIU’s TQS Field Testing To Begin Across Five Critical Areas,” accessed May 11, 2026, https://www.diu.mil/latest/dius-transition-of-quantum-sensing-tqs-field-testing-to-begin-across-five; “Breaking Barriers to Quantum Sensing for Civil, Defense and Intel | Leidos,” accessed May 11, 2026, https://www.leidos.com/insights/breaking-barriers-quantum-sensing-civil-defense-and-intel.
- “Skydio X10 Asimov: 39.237 - 29 May 2025,” Skydio, May 19, 2025, https://support.skydio.com/hc/en-us/articles/37154269660955-Skydio-X10-Asimov-39-237-29-May-2025; “Entities Overview | Lattice Developers | Documentation,” accessed May 11, 2026, https://developer.anduril.com/guides/entities/overview; waymo-research, “Waymo-Open-Dataset/Tutorial/Tutorial_v2.Ipynb at Master · Waymo-Research/Waymo-Open-Dataset,” GitHub, accessed May 11, 2026, https://github.com/waymo-research/waymo-open-dataset/blob/master/tutorial/tutorial_v2.ipynb; Sangeeta Mittal et al., “Sensor Fusion Models in Autonomous Systems: A Review,” Computers, Materials & Continua 87 (February 2026): 1–10, https://doi.org/10.32604/cmc.2025.071599.
- Modernizing DoD Requirements: Enabling Speed, Agility, and Innovation, 5-7, 2020; “10 USC 4401: Requirement for Modular Open System Approach in Major Defense Acquisition Programs; Definitions,” Section a, b, accessed May 11, 2026, https://uscode.house.gov/view.xhtml?req=granuleid:USC-prelim-title10-section4401&num=0&edition=prelim; “The Pentagon’s AI-First Mandate: 5 Strategic Insights Reshaping Defense Procurement in 2026,” In the News, Fluet, January 27, 2026, https://fluet.law/the-pentagons-ai-first-mandate-5-strategic-insights-reshaping-defense-procurement-in-2026/.

Up Next

Article
Securing Tomorrow: A Look at the 18th International Conference on Cyber Conflict
From International Security Program